Thus With a Kiss I Die
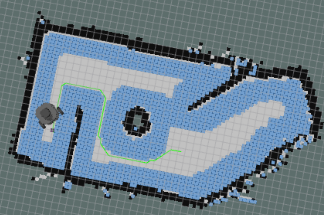
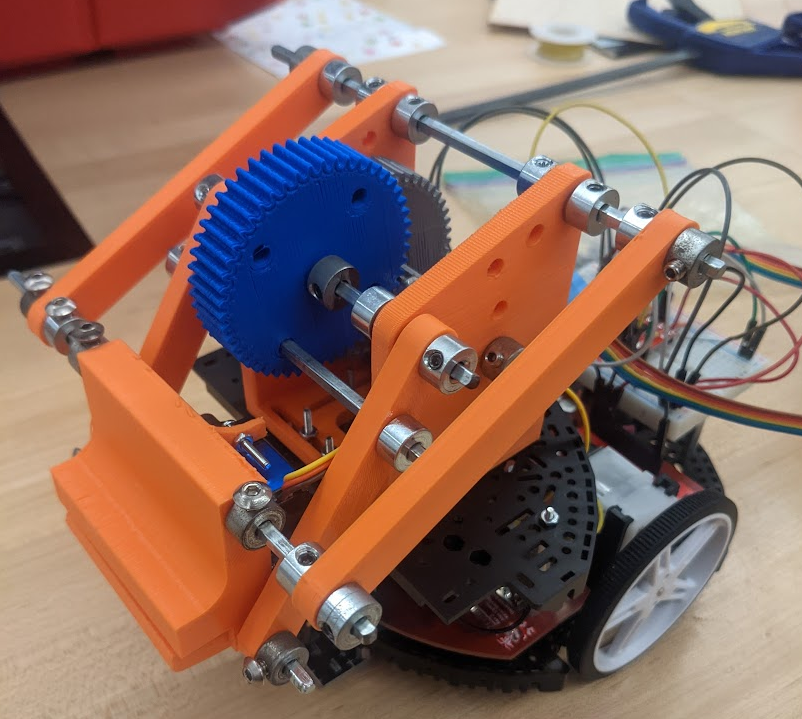
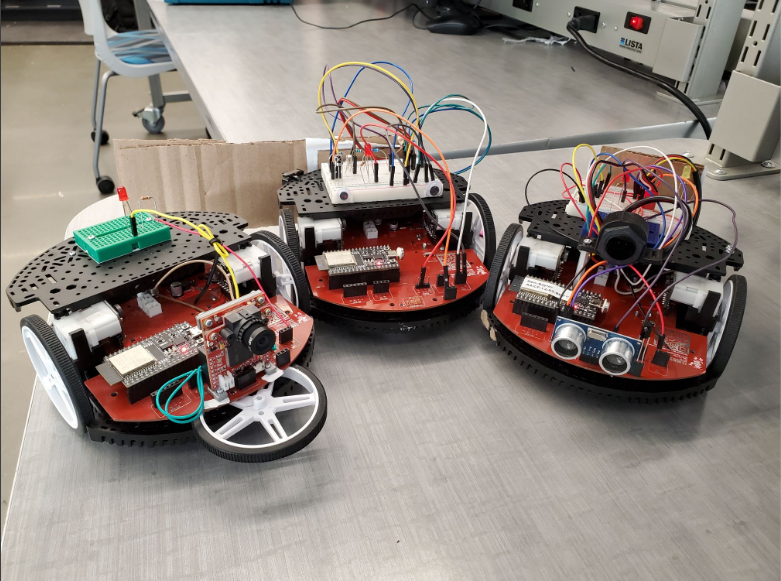
I worked with a team to implement a multi-robot system for a Romeo and Juliet performance, featuring three robots—some with dual roles. The robots communicated via MQTT over WiFi, allowing reliable coordination of scene cues and timing, outperforming IR-based alternatives. Each robot followed a character-specific “script” of tasks and advanced actions upon receiving triggers. AprilTag tracking with OpenMV cameras enabled consistent following behavior. All robots shared a unified base program for general functions, leveraging a common drive platform.