Testing and Results
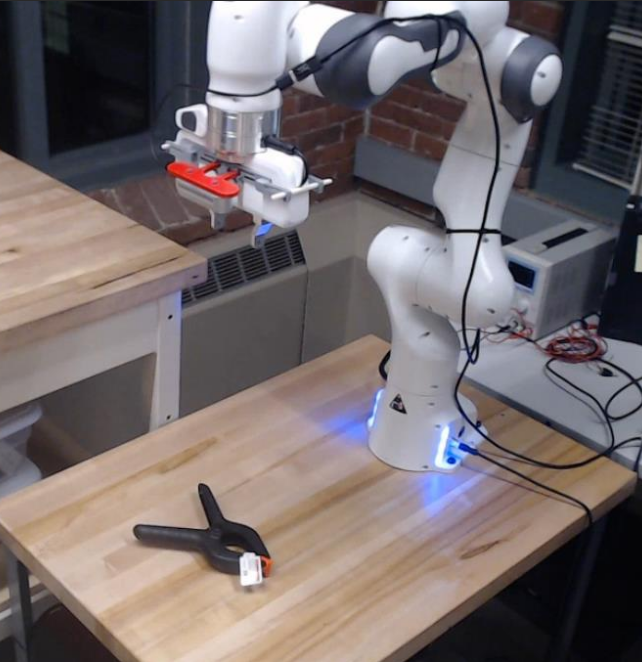
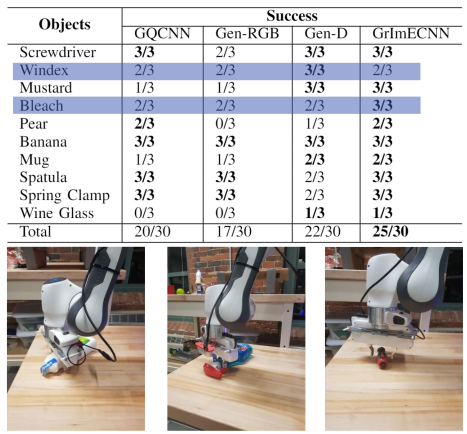
We proposed an Ensemble Convolutional Neural Network (ECNN) using a Mixture of Experts model. Multiple grasping networks (experts) were combined with a gating network that assigns input-dependent weights, allowing the ensemble to exploit each expert’s strengths and reduce generalization errors. Three ensemble variants were developed: Constant Weights, Image-based (ImECNN), and Grasp+Image-based (GrImECNN). The networks were trained using the Cornell Grasping Dataset and tested on real-world YCB objects with a Franka Emika robot. Results showed up to a 6% increase in classification accuracy compared to the strongest individual expert, demonstrating improved grasp quality estimation with minimal computational overhead.
