Testing and Results
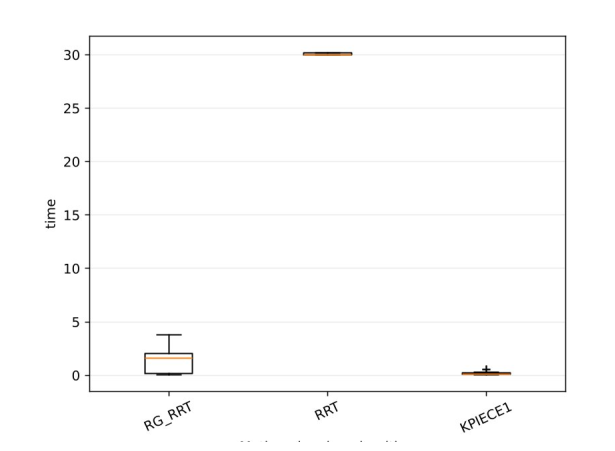
While testing the KPIECE1, RG-RRT, and RRT based kinodynamic planners I found that the optimal planner for a combat robot is a KPIECE1 planner. During the trials it did not require an approximate solution once, while the RRT and RG-RRT planners both required one the majority of the time. When solving a problem to find a correct solution RG-RRT only worked 43 percent of the time when compared with RRT and KPIECE1 getting 100 percent of the problems with correct solution. However, while analyzing the percentage of paths found, it was revealed that RRT could not solve any, while RG-RRT could only solve around 43 percent, meanwhile KPIECE1 could solve every path. The number of graph motions had results identical to the number of graph states. Finally in the most important metric, KPIECE1 outperformed both RG-RRT and standard RRT with KPIECE1 having an average solving time of roughly 0.1s.