Results
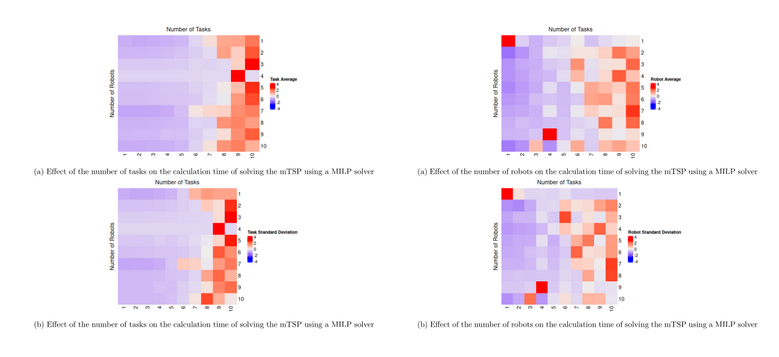
The MILP solver consistently generated optimal schedules across all tested cases, validating its role as a reliable benchmark for multi-robot task allocation. However, the analysis showed that computation time increased super-linearly as the number of tasks or robots grew, with heatmaps revealing distinct inflection points where complexity rose sharply. While MILP guarantees optimal solutions, it does not scale well to larger swarms, making it impractical for real-time or large-scale deployments. The findings highlight the importance of alternative approaches, such as heuristic methods or neural network–based schedulers. This project not only provided a detailed characterization of MILP for MRTA but also established a baseline for comparing future algorithms.